Anti-Drawing Machine
2019
Collaborators:
Harsh Kedia
Akshat Prakash
This is a robot that allows for an augmented drawing experience by manipulating the rotation and position of an ordinary piece of paper. This “machine” exists at that very fine line between disruption and collaboration, trying to be a little bit of both at the same time.
Context
This project aims to be a fun way to change the ways we see robots today—instead of purely utilitarian and precise, we created a robot that can be whimsical and imperfect.

Building
For this project, I was in charge of design, electronics, exhibition, and documentation. The other two teammates focused on the paper movement and vision code, and we all worked on fabrication together.
Initial prototype that we used to test motion. Though quick and dirty, we wanted to focus on the quality of interaction.
We modelled and laser cut/ CNC’d a housing to hold all the electronics parts.

It was really important for me to have a well crafted piece. My role as a designer is to create a good user experience, and part of that is having a beautiful object that doesn’t distract from the actual interaction. Though a lot more work, this was an important part of the project!
I also spent some time soldering to make all the electronics run off one barrel jack that was cleanly mounted to the housing.
Setup
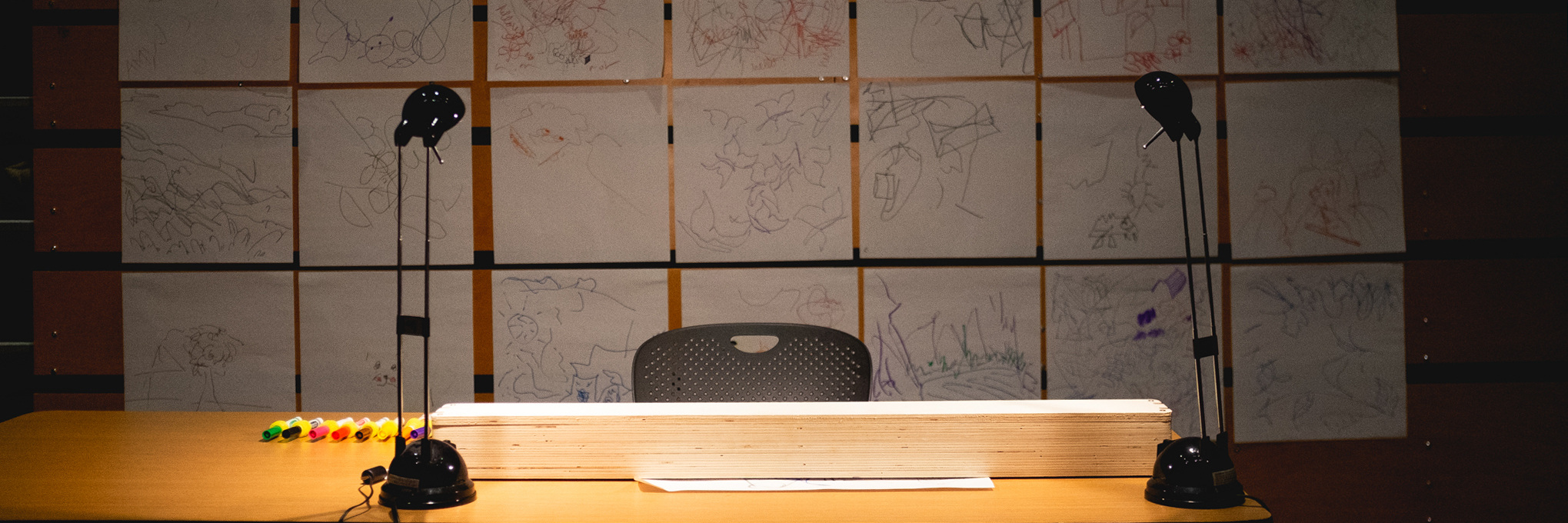
For our final exhibition, we sealed everything inside of a clean box. We wanted to have paper available for people to take and draw on, so we cut 30 sheets of 18″ x 18″ paper. The lighting was set so that all the focus was on the paper.
I wanted to embrace this “child-like” aesthetic because of how the drawings looked, so we chose to use Crayola markers!

I also chose to stick up all the drawings on the back. There was an interesting effect where the back wall started to have that “refrigerator drawings” feeling.

Results
It was really interesting to observe how different people used the machine differently. Most people made very gestural and pattern-based drawings, but other people treated it like a game where they were determined to finish their original drawings.
Various people using the robot.









We found interesting behavior emerging from the usage of the machine—people were able to invent new techniques as well as produce strokes that would otherwise be impossible. To us this was a win.
Gestural strokes emerging from the robot behavior.
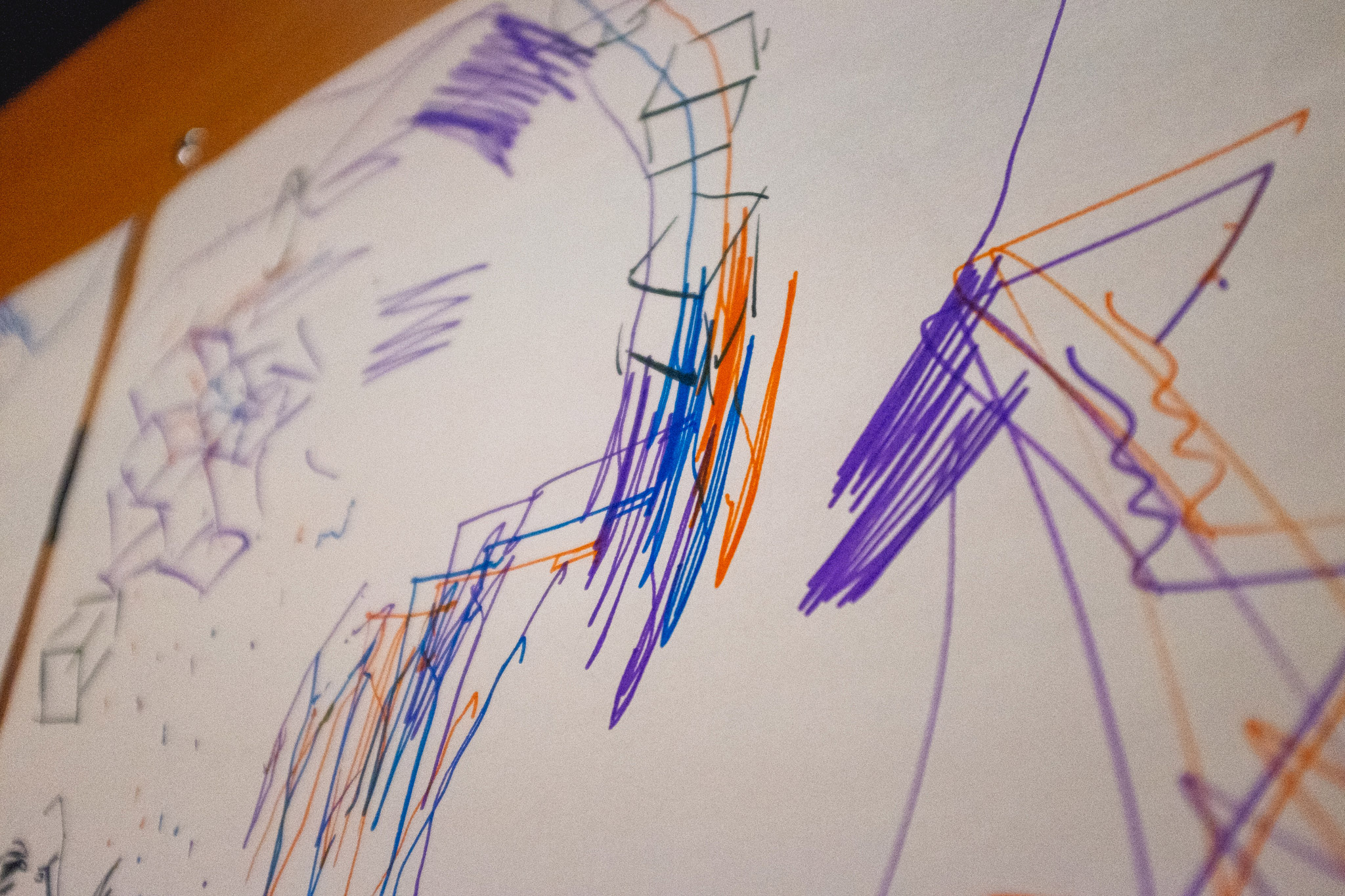
Multi-marker methods to highlight robot motion.

There was a spectrum of feedback, from mild frustration to wild enjoyment. Most of the participants did not recognize any sort of logic in the robot motion unless they specifically asked about it. This was largely due to the focus mainly being on the drawing itself.
Gestural strokes emerging from the robot behavior.

Ultimately, everyone who tried the machine told us they had a fun time and were extremely pleased to have created a drawing that is not necessarily perfect. This machine seemed to alleviate the expectations to make drawings with extreme craft, and it kind of “evened the playing field” for all participants.
Final Thoughts
With a lot of physical computing projects, there is a tendency to create a very hacky-makey object and focus mostly on the code. However, I learned a lot about the value of having good craft in both the code and the physical object itself. I spent a lot more time on making an enclosed object with minimal electronics, and it paid off in creating a more seamless and ‘magical’ experience. I thoroughly enjoyed the process of reimagining the ways we do everyday things with new platforms, tools, and technologies.