
Tangible Interaction Experiments
2019
In this project, I experiment with 2DOF control over a robot with an ordinary smartphone. Through this experiment, I learn a lot about how to better design hardware interactions.
Problem Space
These interactions map rotational movement to linear movement. I was initially concerned that this would be an incompatible pair, but it actually felt very natural, kind of like a dial. Plus, you could use the natural inertia of the rotation as an intuitive intent.
Iteration and Prototyping
These are the steps I took to arrive at the final form.
Initial functional prototype made with a servo and my OSC app
After the initial functional prototype, I decided to take it further and make a full pan-tilt system. I decided against using that same servo because of the limited rotational range as well as the heavy limitations with passing many values quickly. I decided to use IQ Motion Module motors.
Some developments with the form, considering the Arduino placement

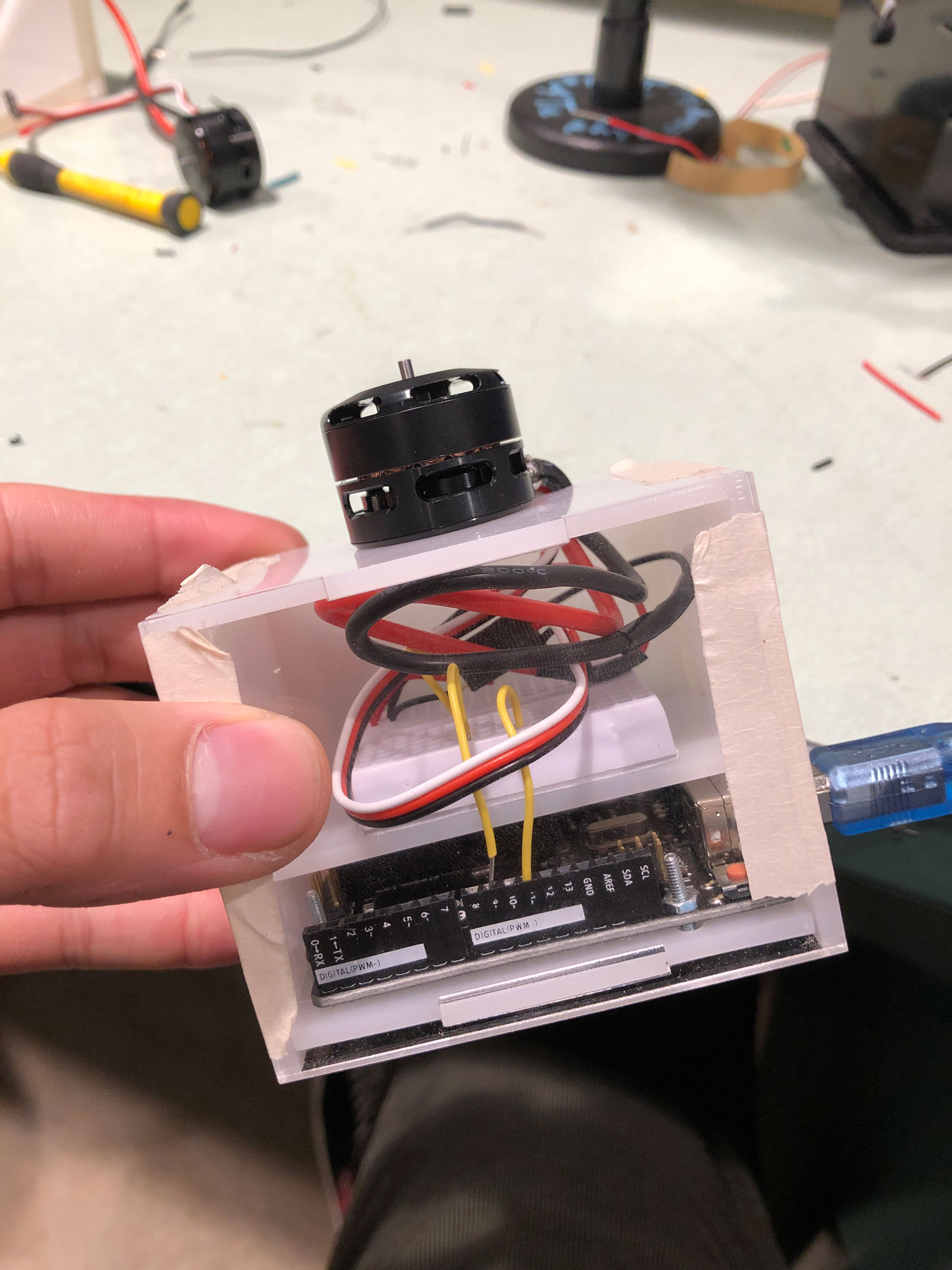

For these prototypes, I designed the top cover to be removeable and the front to be clear acrylic, so debugging the electricity would be easier. I planned to seal everything later on.
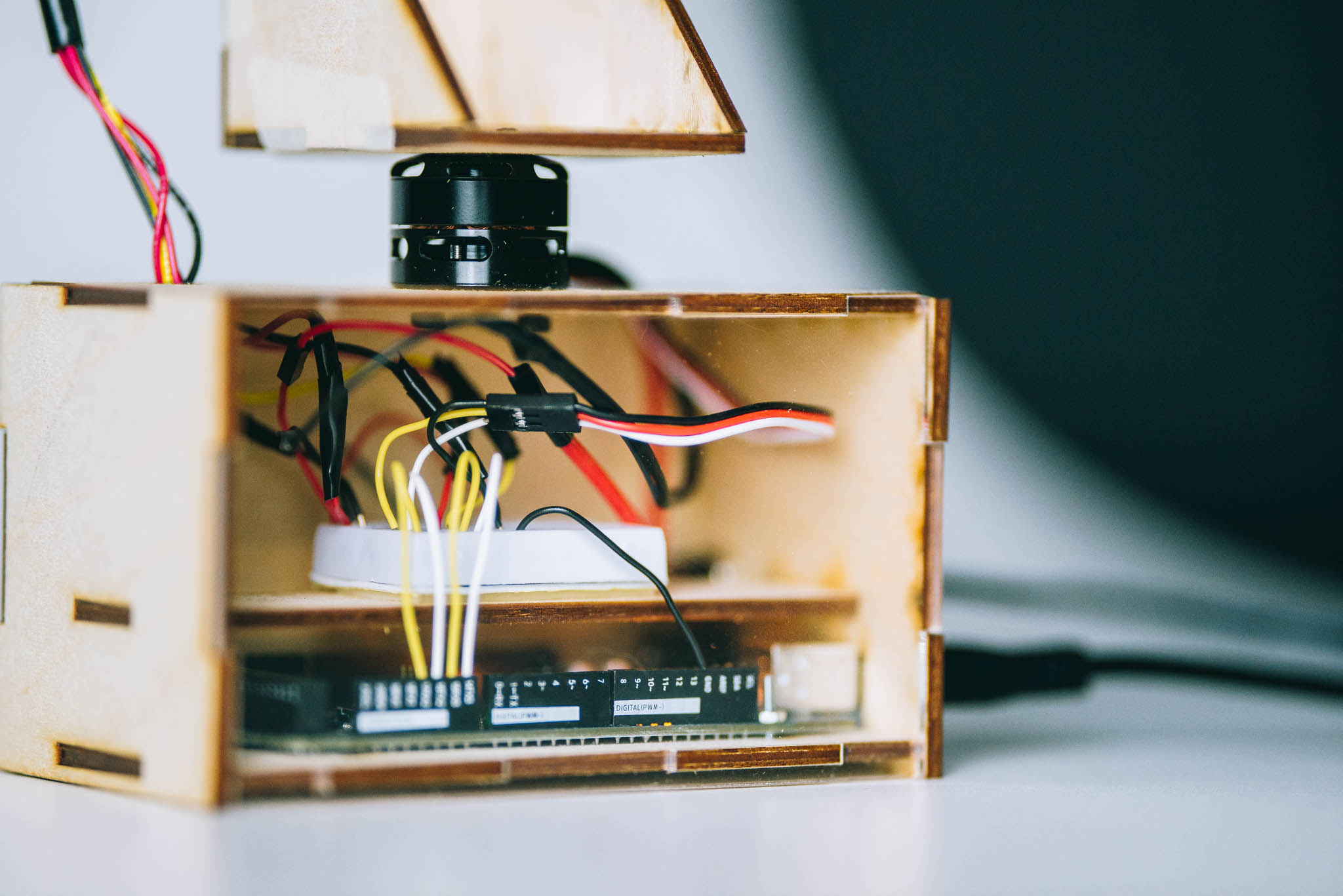
Functional wooden prototype. Notice the panel mounts that make the model self-contained and easy to power!
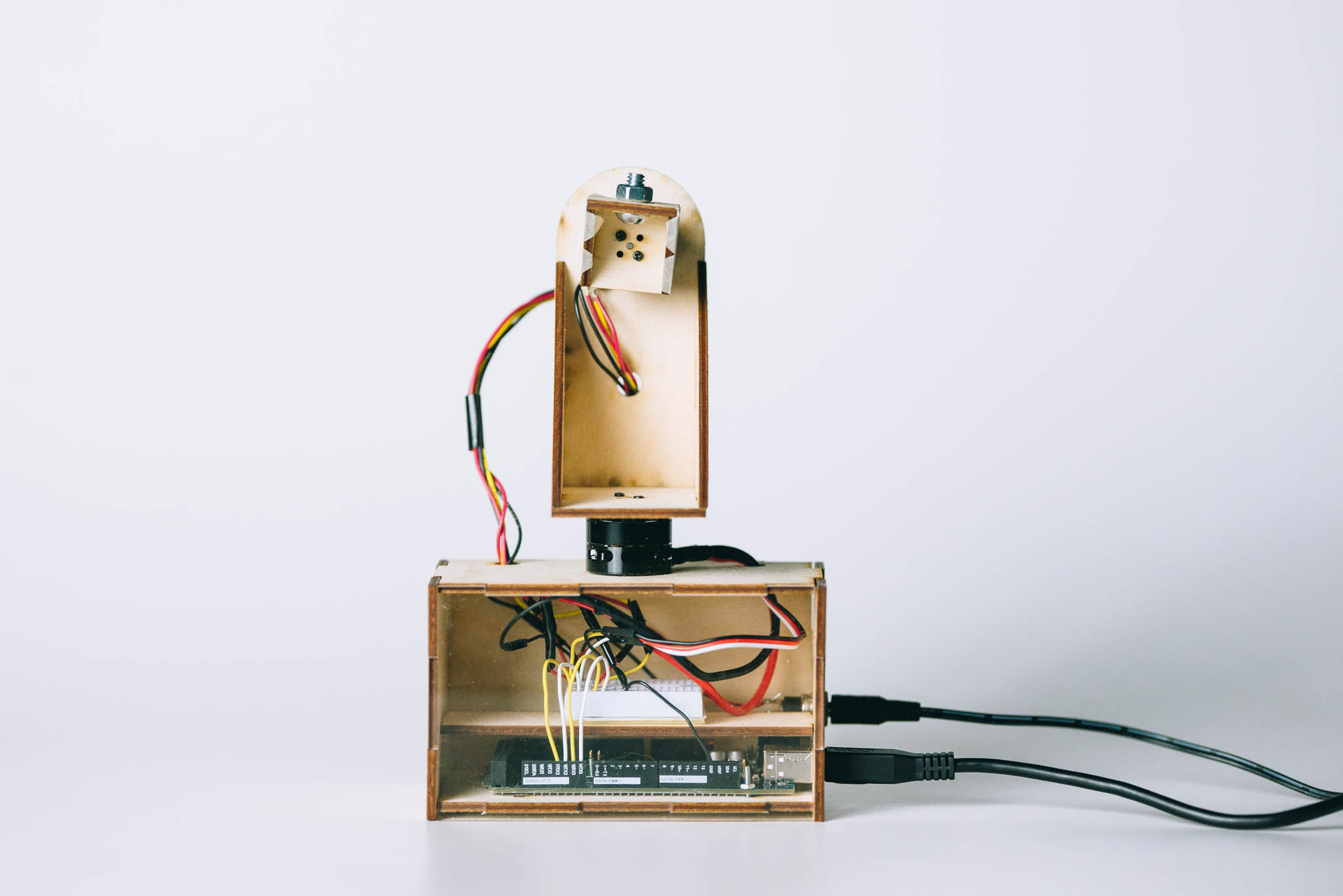
This was the first working prototype. When I actually saw the robot copying my movement, I started to easily see the robot as an extension of my hand, and found myself manipulating its roations extremely intuitively.
First working demo. Not visible in the video, but I also programmed haptics to trigger when the phone is rotated past the robot’s reach.
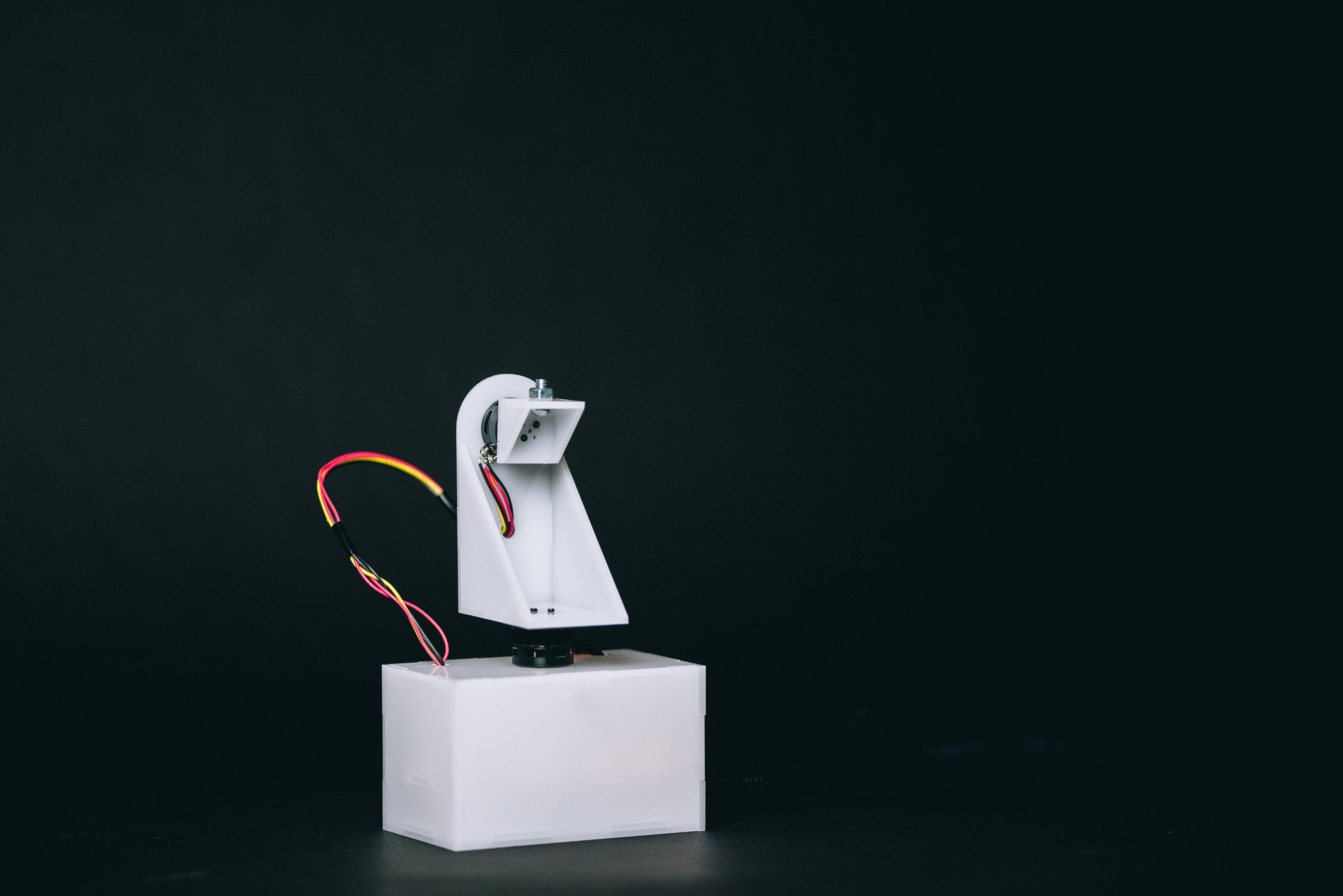
Lastly, I created a polished case with translucent white acrylic and covered the front to hide the electronic components.
Functional wooden prototype. Notice the panel mounts that make the model self-contained and easy to power!

Final Thouhts
This interaction exploration allowed me to understand an approach to make robots
more approachable and intuitive to interface with. Although it is not a far reach
to type out angles for these different motors to go to, the physical mainpulation affords
an intuition that allows you to focus exactly on what the robot should be doing,
not how it should do that thing. I started to understand how thoughtful interactions, even
for seemingly intimidating things like robots, can make tasks extremely approachable and
intuitive.
This is just the foundation—there is so much more to be done with different attachments and
possibly more degrees of freedom. I hope to find time to continue these explorations!